








John
2025: The year of refining and struggling well
Finally, be strong in the Lord and in his mighty power.
—Ephesians 6:10
First, thank you for taking the time to read through our family’s Thanksgiving letter. I’ll try to keep my section brief, only mentioning things of most importance. Feel free to skip a section if you find something irrelevant to your life.
Running—Did you know that over 30 minutes of moderate to intense physical activity is recommended to counteract the increased mortality risk attained from prolonged occupational sitting? Yes, check out this study for more details. Note: It is possible that some of the risk may come from the long working hours (> 40 hr./week) commonly associated with individuals who predominantly sit at work. In 2025 I have run ~1,734 miles. More importantly, I have stayed injury free. I don’t believe this is due to luck. I have focused on taking more steps per minute and swinging my leg close to underneath my body before landing. This is the natural gait that God designed but our modern-day shoes with elevated heels (and excess cushion) have ruined. Here is a video showing my running form just in case you wanted to see what I am referring to. I would suggest getting natural shoes such as a pair from Altra or Topo Athletic if you’re interested in walking/running with less knee and hip pain (but with tighter calf muscles 😉).
Cross Country (more running 😬)—This year was incredible! I placed first
back-to-back at three meets early in the season. My fastest time for the 5 km was at
Indiana Wesleyan University with a time of 16:46.0. Alright, that’s enough about
running. Our team’s motto this year was struggle well.
Life has lots of struggles
that are unavoidable and will grow us if we allow.
Vacation—This summer our whole extended family flew out to Denver,
Colorado for my cousin Mike’s wedding. While in Colorado, we spent two days hiking through
the rocky terrain. My favorite was hiking Lily Mountain just outside Estes Park. The wind
whipped around the rocky face of the mountain as a storm neared. Thankfully, it only
sprinkled a little. This was one of my favorite experiences this year.

Robotics—Last season my VEX V5 Robotics team, 2393S Valor, competed at the state championship. We didn’t rank very high in part due to our unreliable autonomous routines. They were much better than the previous year but still subpar.
This season we used (non-motorized) tracking wheels on our robot along with a gyroscope
to calculate our robot’s global position on the field from small relative motion samples
taken every 10 milliseconds. Here is a great video explaining
the process if you’re interested. This technology, odometry, allowed our robot to
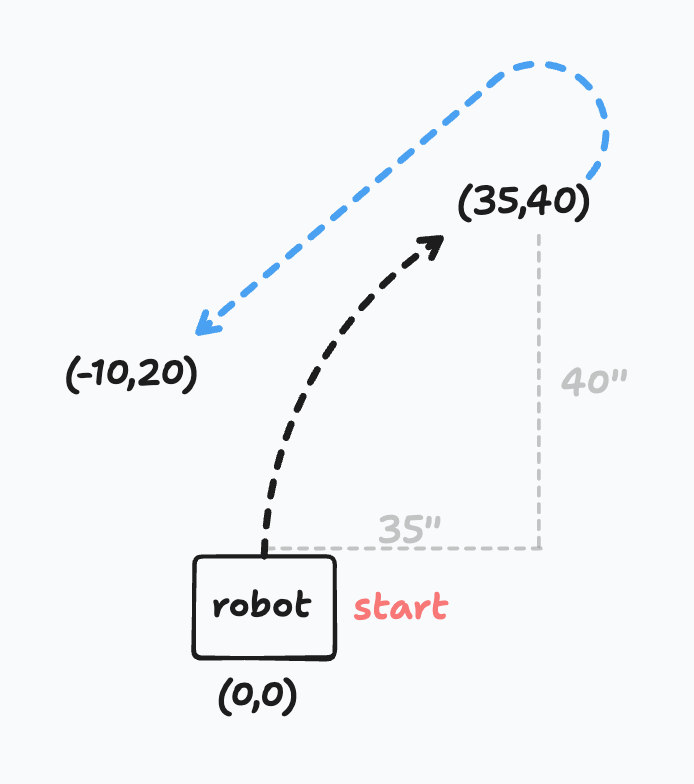
constantly seek a position on the field. Previously, we would program our robot using
commands such as drive forward 40 inches; turn to 90°; drive forward 35 inches. Now we can
simply tell the robot to drive to (35, 40) on the Cartesian plane (representing the
field). Below is a drawing showing an example path the robot could take:
At our first competition on Nov. 15, we scored 54 points for the 60-second autonomous skills portion, the second highest autonomous routine in the highly competitive state of Indiana at the time. Here is a video showing the preprogrammed routine. We also competed in the Speedway signature event the next weekend. Teams from the United States and Canada participated. We placed 65th out of 104 teams. We look forward to improving our robot and autonomous routines for the rest of the season.